|
I am a 5th year PhD student in Electrical Engineering and Computer Science(EECS) at UC Berkeley where I am advised by Ken Goldberg as a member of the AUTOLab and Berkeley Artificial Intelligence Research (BAIR) Lab. I am supported by the Bakar BioEnginuity Impact Grant. My research interests are in robotics and computer vision. My current research is in Agricultural Robotics, Cloud Robotics and Manipulation of 1D Deformable Linear Objects (DLO). In the past, I graduated from MTSU Murfreesboro, where I worked with Lei Miao on robotics for fall detection and received the Outstanding Masters Research Award, College of Basic and Applied Sciences. I have also been fortunate to spend time at UCLA and Vanderbilt University. Email / CV / Google Scholar / X (Twitter) / Github |

|
|
|
|

|
Guanhua Ji*, Harsha Polavaram*, Lawrence Yunliang Chen*, Sandeep Bajamahal, Zehan Ma, Simeon Adebola, Chenfeng Xu, Ken Goldberg Preprint project page / paper / video / code / data We augment 16 OXE datasets into 4.4 million trajectories across 9 robot types for each dataset. |

|
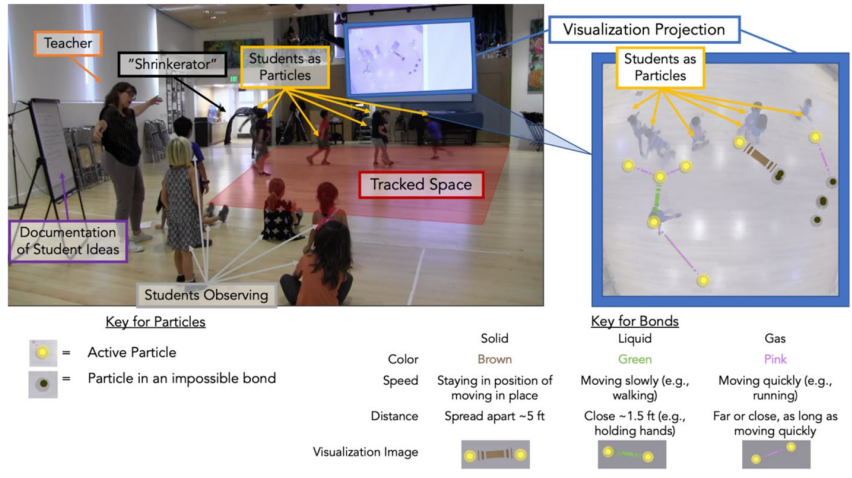
Sarah Jaewon Lee, Xintian Tu, Simeon Adebola, Noel Enyedy, Joshua Danish International Journal of Computer-Supported Collaborative Learning, 2025 paper This journal paper extends our CSCL 2022 paper. |
|
|
Simeon Adebola, Chung Min Kim, Justin Kerr, Shuangyu Xie, Prithvi Akella, Jose Luis Susa Rincon, Eugen Solowjow, Ken Goldberg IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 project page / paper We created segmented 3D reconstructions of eight potted plants and used those to guide a robot's interaction with the plants to reveal occluded leaf structures. |
|
|
Simeon Adebola, Shuangyu Xie, Chung Min Kim, Justin Kerr, Bart M. van Marrewijk, Meike van Vlaardingen, Tim van Daalen, E.N. van Loo, Jose Luis Susa Rincon, Eugen Solowjow, Rick van de Zedde, Ken Goldberg IEEE International Conference on Automation Science and Engineering (CASE), 2024 project page / paper Temporal reconstructions of plants across multiple timesteps by combining 3D reconstructions with a robust sample alignment pipeline using a two-stage registration approach. |

|
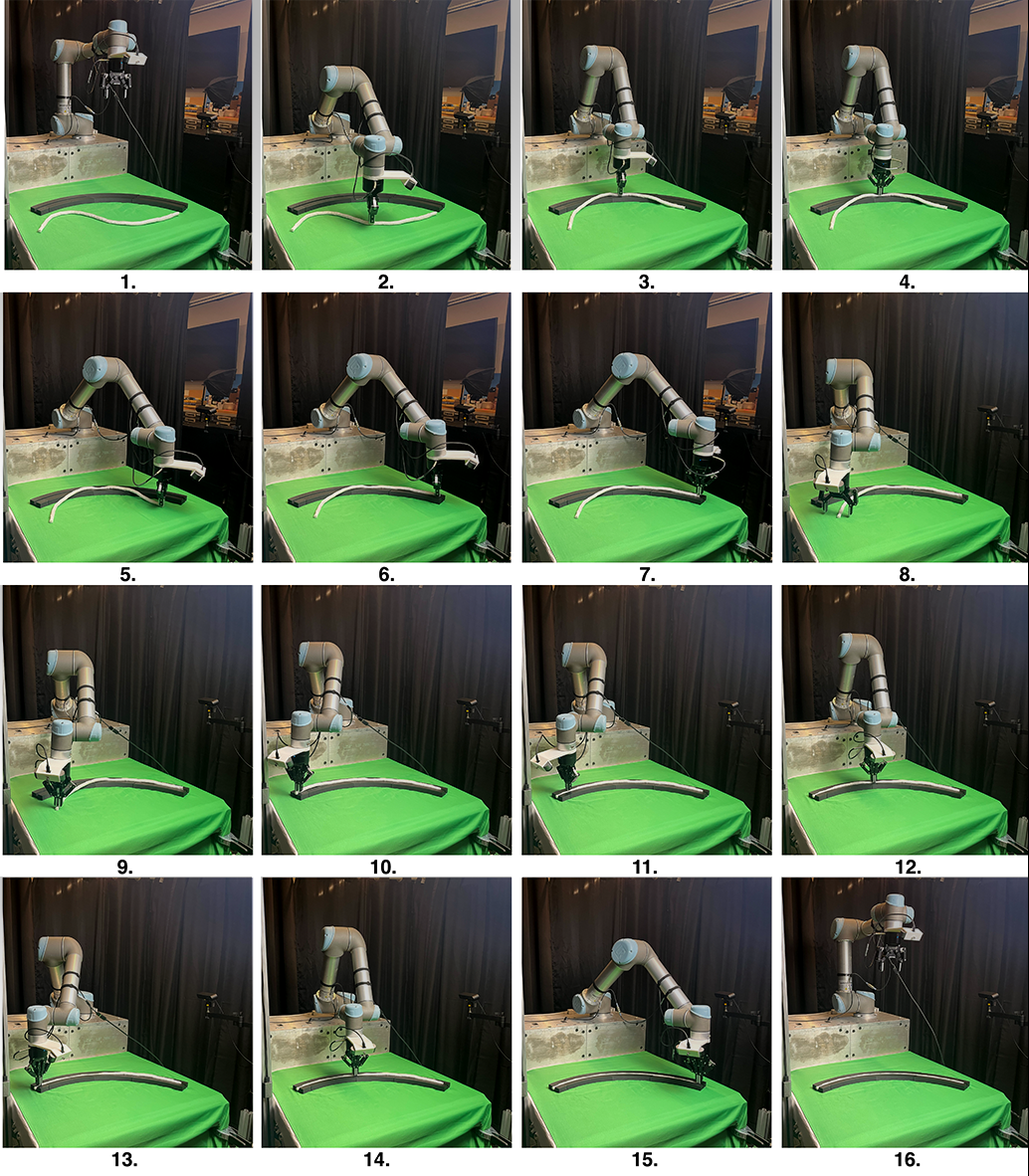
Simeon Adebola*, Tara Sadjadpour*, Karim El-Refai*, Will Panitch, Zehan Ma, Roy Lin, Tianshuang Qiu, Shreya Ganti, Charlotte Le, Jaimyn Drake, Ken Goldberg IEEE International Conference on Automation Science and Engineering (CASE), 2024 project page / paper / code / data / CAD files Novel gasket assembly task with three testbeds and a benchmark comparison between three procedural algorithms and one deep imitation learning approach across 100 trials. |
|
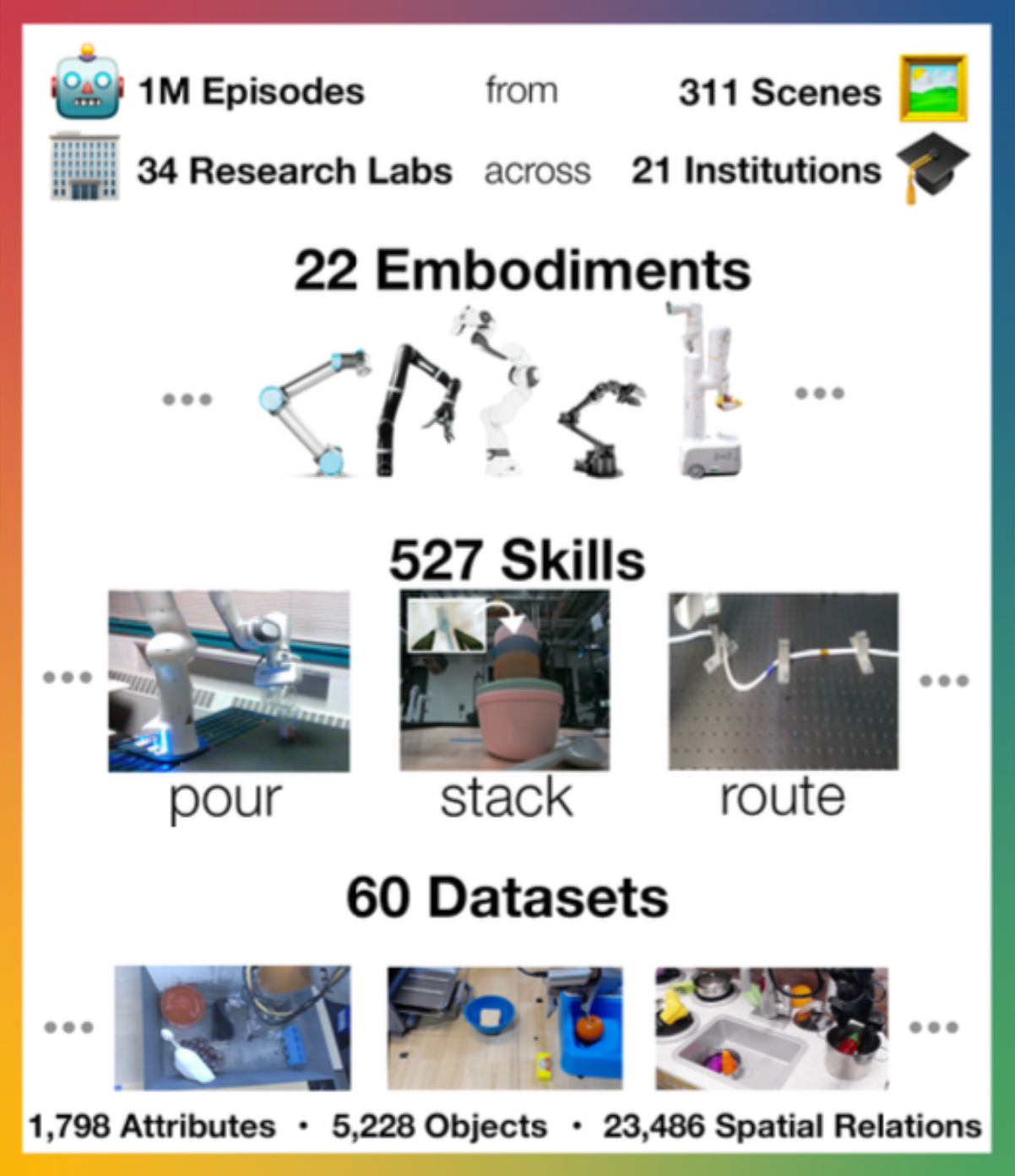
Abby O'Neill, Abdul Rehman, Abhiram Maddukuri, Abhishek Gupta, Abhishek Padalkar, Abraham Lee, Acorn Pooley, Agrim Gupta, Ajay Mandlekar, Ajinkya Jain, Albert Tung, Alex Bewley, Alex Herzog, Alex Irpan, Alexander Khazatsky, Anant Rai, Anchit Gupta, Andrew Wang, Anikait Singh, Animesh Garg, Aniruddha Kembhavi, Annie Xie, Anthony Brohan, Antonin Raffin, Archit Sharma, Arefeh Yavary, Arhan Jain, Ashwin Balakrishna, Ayzaan Wahid, Ben Burgess-Limerick, Beomjoon Kim, Bernhard Schölkopf, Blake Wulfe, Brian Ichter, Cewu Lu, Charles Xu, Charlotte Le, Chelsea Finn, Chen Wang, Chenfeng Xu, Cheng Chi, Chenguang Huang, Christine Chan, Christopher Agia, Chuer Pan, Chuyuan Fu, Coline Devin, Danfei Xu, Daniel Morton, Danny Driess, Daphne Chen, Deepak Pathak, Dhruv Shah, Dieter Büchler, Dinesh Jayaraman, Dmitry Kalashnikov, Dorsa Sadigh, Edward Johns, Ethan Foster, Fangchen Liu, Federico Ceola, Fei Xia, Feiyu Zhao, Freek Stulp, Gaoyue Zhou, Gaurav S. Sukhatme, Gautam Salhotra, Ge Yan, Gilbert Feng, Giulio Schiavi, Glen Berseth, Gregory Kahn, Guanzhi Wang, Hao Su, Hao-Shu Fang, Haochen Shi, Henghui Bao, Heni Ben Amor, Henrik I Christensen, Hiroki Furuta, Homer Walke, Hongjie Fang, Huy Ha, Igor Mordatch, Ilija Radosavovic, Isabel Leal, Jacky Liang, Jad Abou-Chakra, Jaehyung Kim, Jaimyn Drake, Jan Peters, Jan Schneider, Jasmine Hsu, Jeannette Bohg, Jeffrey Bingham, Jeffrey Wu, Jensen Gao, Jiaheng Hu, Jiajun Wu , Jialin Wu, Jiankai Sun, Jianlan Luo, Jiayuan Gu, Jie Tan, Jihoon Oh, Jimmy Wu, Jingpei Lu, Jingyun Yang, Jitendra Malik, João Silvério, Joey Hejna, Jonathan Booher, Jonathan Tompson, Jonathan Yang, Jordi Salvador, Joseph J. Lim, Junhyek Han, Kaiyuan Wang, Kanishka Rao, Karl Pertsch, Karol Hausman, Keegan Go, Keerthana Gopalakrishnan, Ken Goldberg, Kendra Byrne, Kenneth Oslund, Kento Kawaharazuka, Kevin Black, Kevin Lin, Kevin Zhang, Kiana Ehsani, Kiran Lekkala, Kirsty Ellis, Krishan Rana, Krishnan Srinivasan, Kuan Fang, Kunal Pratap Singh, Kuo-Hao Zeng, Kyle Hatch, Kyle Hsu, Laurent Itti, Lawrence Yunliang Chen, Lerrel Pinto, Li Fei-Fei, Liam Tan, Linxi "Jim" Fan, Lionel Ott, Lisa Lee, Luca Weihs, Magnum Chen, Marion Lepert, Marius Memmel, Masayoshi Tomizuka, Masha Itkina, Mateo Guaman Castro, Max Spero, Maximilian Du, Michael Ahn, Michael C. Yip, Mingtong Zhang, Mingyu Ding, Minho Heo, Mohan Kumar Srirama, Mohit Sharma, Moo Jin Kim, Naoaki Kanazawa, Nicklas Hansen, Nicolas Heess, Nikhil J Joshi, Niko Suenderhauf, Ning Liu, Norman Di Palo, Nur Muhammad Mahi Shafiullah, Oier Mees, Oliver Kroemer, Osbert Bastani, Pannag R Sanketi, Patrick "Tree" Miller, Patrick Yin, Paul Wohlhart, Peng Xu, Peter David Fagan, Peter Mitrano, Pierre Sermanet, Pieter Abbeel, Priya Sundaresan, Qiuyu Chen, Quan Vuong, Rafael Rafailov, Ran Tian, Ria Doshi, Roberto Martín-Martín, Rohan Baijal, Rosario Scalise, Rose Hendrix, Roy Lin, Runjia Qian, Ruohan Zhang, Russell Mendonca, Rutav Shah, Ryan Hoque, Ryan Julian, Samuel Bustamante, Sean Kirmani, Sergey Levine, Shan Lin, Sherry Moore, Shikhar Bahl, Shivin Dass, Shubham Sonawani, Shuran Song, Sichun Xu, Siddhant Haldar, Siddharth Karamcheti, Simeon Adebola, Simon Guist, Soroush Nasiriany, Stefan Schaal, Stefan Welker, Stephen Tian, Subramanian Ramamoorthy, Sudeep Dasari, Suneel Belkhale, Sungjae Park, Suraj Nair, Suvir Mirchandani, Takayuki Osa, Tanmay Gupta, Tatsuya Harada, Tatsuya Matsushima, Ted Xiao, Thomas Kollar, Tianhe Yu, Tianli Ding, Todor Davchev, Tony Z. Zhao, Travis Armstrong, Trevor Darrell, Trinity Chung, Vidhi Jain, Vincent Vanhoucke, Wei Zhan, Wenxuan Zhou, Wolfram Burgard, Xi Chen, Xiaolong Wang, Xinghao Zhu, Xinyang Geng, Xiyuan Liu, Xu Liangwei, Xuanlin Li, Yao Lu, Yecheng Jason Ma, Yejin Kim, Yevgen Chebotar, Yifan Zhou, Yifeng Zhu, Yilin Wu, Ying Xu, Yixuan Wang, Yonatan Bisk, Yoonyoung Cho, Youngwoon Lee, Yuchen Cui, Yue Cao, Yueh-Hua Wu, Yujin Tang, Yuke Zhu, Yunchu Zhang, Yunfan Jiang, Yunshuang Li, Yunzhu Li, Yusuke Iwasawa, Yutaka Matsuo, Zehan Ma, Zhuo Xu, Zichen Jeff Cui, Zichen Zhang, Zipeng Fu, Zipeng Lin International Conference on Robotics and Automation (ICRA), 2024 (Oral Presentation, Best Conference Paper Award, Best Student Paper Award Finalist, Best Manipulation Paper Award Finalist) project page / code / PDF A multi-institution project bringing together multiple datasets across multiple robot platforms and multiple skills/tasks with a large model, RT-X trained on the entire dataset. This project was carried out in collaboration with Google Deepmind and 33 different labs across 21 institutions. |
|
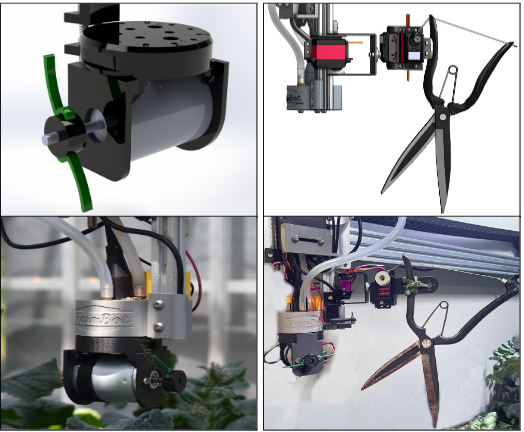
Simeon Adebola, Mark Presten, Rishi Parikh, Shrey Aeron, Sandeep Mukhherjee, Satvik Sharma, Mark Theis, Walter Teitelbaum, Eujen Solowjow, Ken Goldberg IEEE Transactions on Automation Science and Engineering (TASE), 2024 project page / paper / code This journal paper extends our CASE 2022 paper. |
|
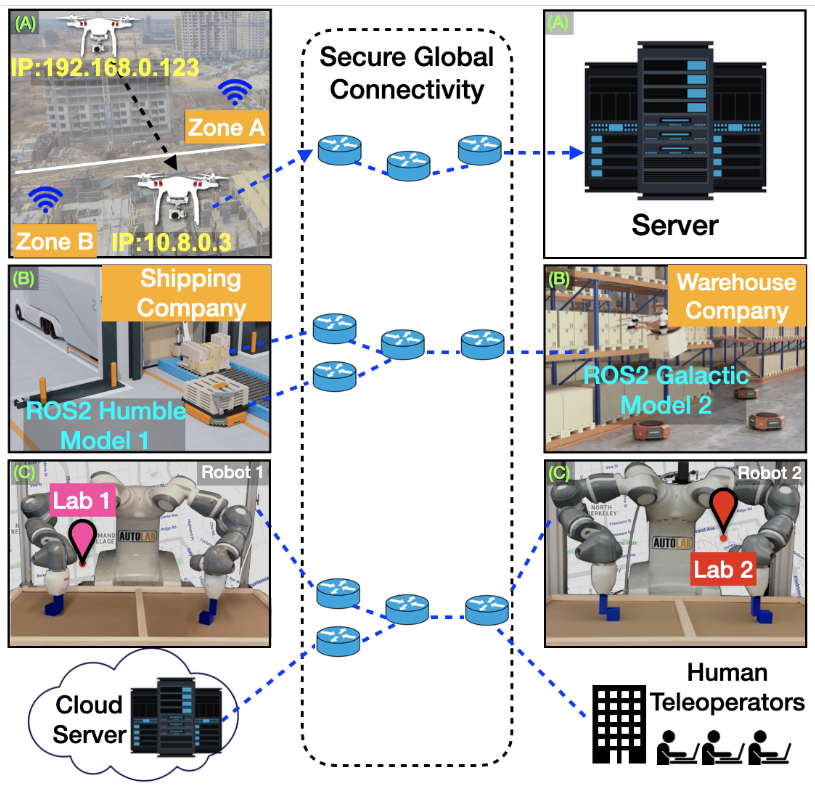
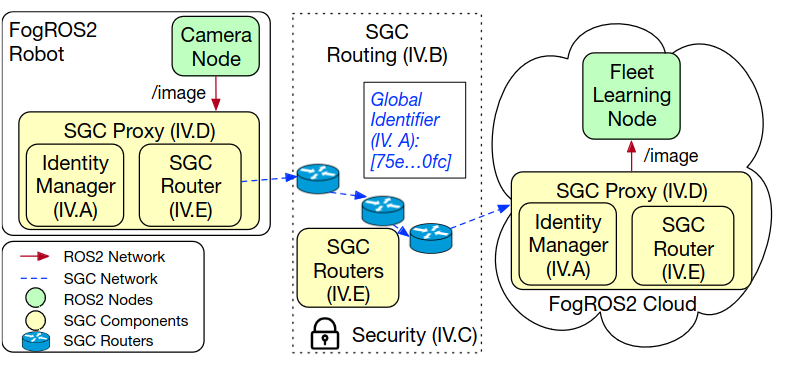
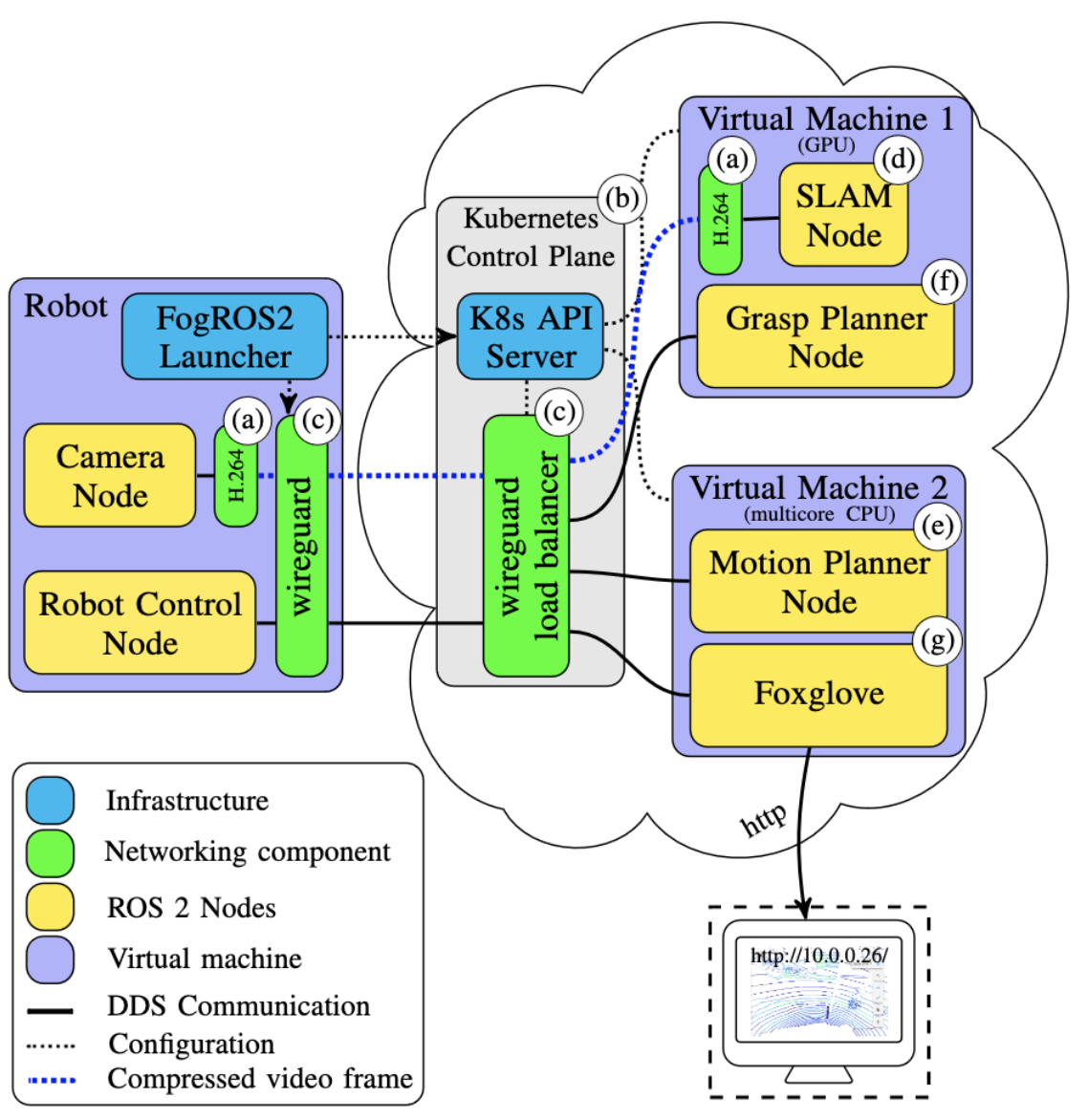
Kaiyuan Chen, Ryan Hoque, Karthik Dharmarajan, Edith LLontop, Simeon Adebola, Jeffrey Ichnowski, John Kubiatowicz, Ken Goldberg IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 project page / video / PDF A platform for connecting robot and robot components across physical locations and networks securely and globally. |
|
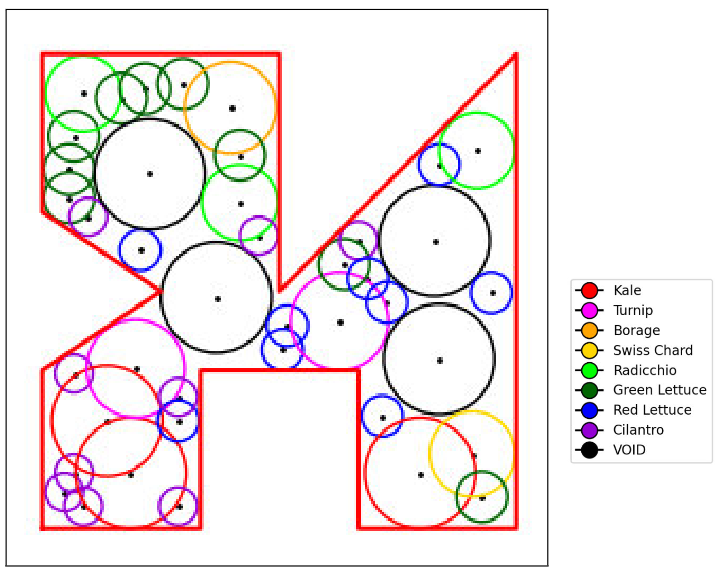
Varun Kamat, Shrey Aeron, Anrui Gu, Harshika Jalan, Simeon Adebola*, Ken Goldberg IEEE International Conference on Automation Science and Engineering (CASE), 2023 An algorithm for seed placement in polyculture settings that works for both convex and non-convex planting areas, for various plants types and numbers. |
 
|
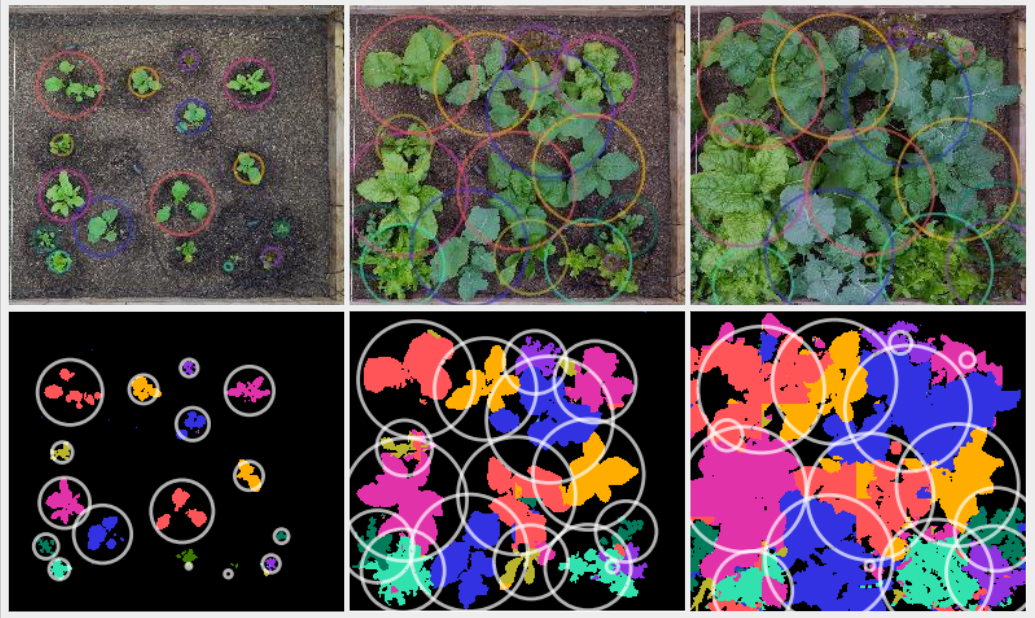
Simeon Adebola*, Rishi Parikh*, Mark Presten, Satvik Sharma, Shrey Aeron, Ananth Rao, Sandeep Mukhherjee, Tomson Qu, Christina Wistrom, Eujen Solowjow, Ken Goldberg International Conference on Robotics and Automation (ICRA), 2023 (Oral Presentation, Outstanding Paper(Automation) Finalist) project page / video / PDF / press (IEEE Spectrum) / press (Popular Science) / press (New Scientist) Comparing humans experts to AlphaGarden on similarly planted gardens two 60-day cycles. Evaluation is based on coverage, diversity, and water usage. |
|
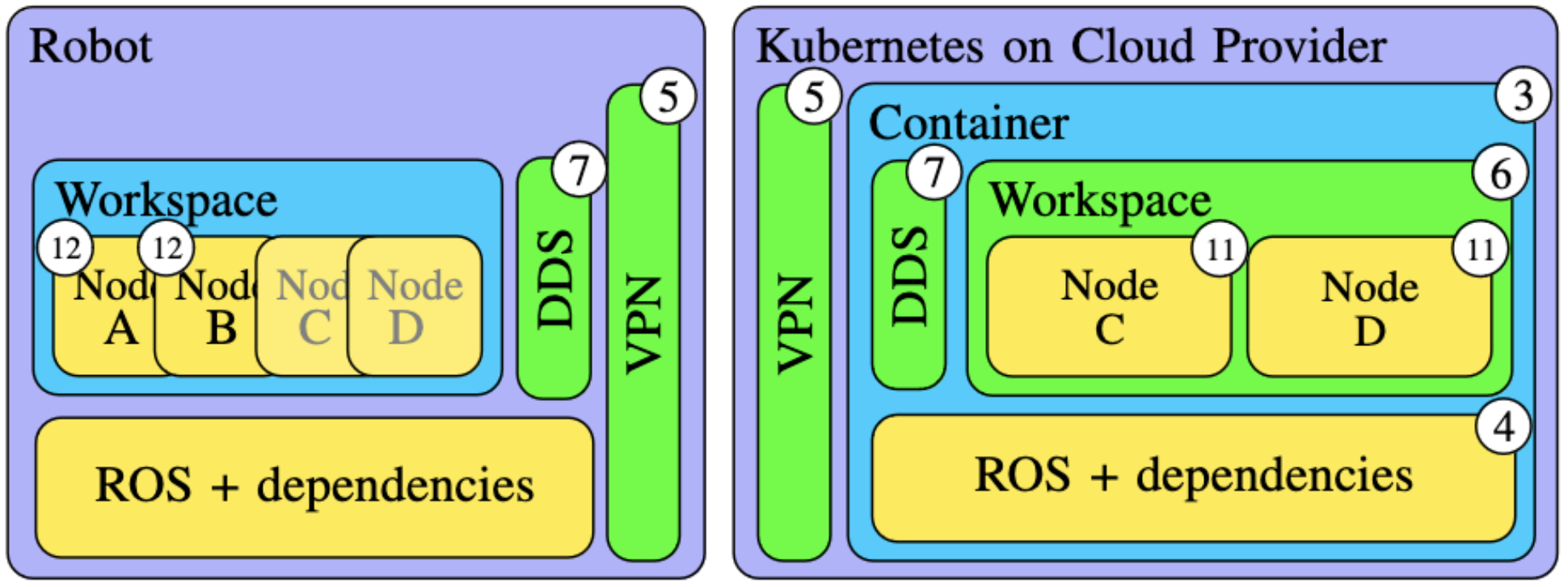
Jeffery Ichnowski, Kaiyuan Chen, Karthik Dharmarajan, Simeon Adebola, Michael Danielczuk, Victor Mayoral-Vilches, Nikhil Jha, Hugo Zhan, Edith Llontop, Derek Xu International Conference on Robotics and Automation (ICRA), 2023 project page / PDF / code An easy way for roboticists using ROS 2 to take advantage of cloud platforms including AWS, Azure and GCS to run any portions of their pipeline. |
|
|
Mark Presten, Rishi Parikh*, Shrey Aeron, Sandeep Mukhherjee, Simeon Adebola, Satvik Sharma, Mark Theis, Walter Teitelbaum, Ken Goldberg IEEE International Conference on Automation Science and Engineering (CASE), 2022 (Oral Presentation, Best Conference Paper Award) project page / PDF / code Novel hardware and algorithms for automated pruning of polyculture plants with results for four 60-day garden cycles. This paper is extended in our journal paper. |

|
Sarah Jaewon Lee, Xintian Tu, Simeon Adebola, Noel Enyedy, Joshua Danish International Conference on Computer-Supported Collaborative Learning (CSCL), 2022 An exploration, using interaction analysis, of how children use teacher-, peer-, and technology-provided feedback together towards collective and embodied learning in a mixed-reality environment. This paper is extended in our journal paper. |
 
|
Simeon Adebola, Ken Goldberg AFRICON, 2021 Lessons from AlphaGarden including its seed planting algorithm can be leveraged for polyculture farming in Africa |
|
Anna Waldman-Brown, Juliet Wanyiri, Simeon Oluwafunmilore Adebola, Tim Chege, Marian Muthui ICCIG, 2015 Maker initiatives should embrace and integrate with the informal sector and grassroots innovators. |
|
S. O. Adebola, O. A. Odejobi, O. A. Koya AFRICON, 2013 A low-cost 5 DOF robot for STEM education made using indigenously sourced parts and reused motors. |
|
|
Oluwafunmilore Adebola, Simon Adebola ATPS, 2012 Africa's STI policy should include an indigenous futures(Strategic Foresight) component. |
|
|
|
This website's template comes from Jon Barron. |